Контроллер электровелосипеда: что это, принцип работы, виды, выбор, популярные модели, подключение
Содержание:
Описание контроллера КМЭ-8
Для того чтобы лучше ознакомиться с назначением и принципом работы контроллера, можно взять несколько конкретных примеров. На множестве грузовых электровозов установлен такой прибор, как КМЭ-8.
Что касается его конструктивного исполнения, то он относится к кулачковым приспособлениям. Если говорить о контроллере КМЭ-8, то состоит он из следующих основных частей: корпуса, имеющего литое основание, литой крышки и нескольких вертикальных стоек. Спереди весь корпус покрыт кожухом, сзади также имеется кожух, но уже съемный. К задним вертикальным стойкам контроллера крепятся те самые контакторные элементы для управления. Подвижными контактами будут управлять кулачковые шайбы, которые надеваются на специальные вертикальные валы. Именно вращением этих валов будет управлять машинист, перемещая рукоятки контроллера.
Основные типы
Назначение контроллера машиниста остается неизменным при любой конструкции. На сегодняшний день различают два основных вида — барабанный, кулачковый.
Что касается конструкции барабанных контроллеров, то в данном случае замыкание и размыкание проводов цепи управления будет осуществляться при помощи специальных сегментов, расположенных на барабане. К данному сегменту прикреплены так называемые пальцы, которые, в свою очередь, соединены с соответствующими проводами управления электрической цепью. Сами пальцы крепятся к стойке.
Если говорить о кулачковых контроллерах, то в данном случае вместо барабана для замыкания управляющих проводов цепи используются кулачковые контакторы или же контакторные элементы. Данные элементы крепятся на специальной стойке, а воздействуют на них кулачковые шайбы.
Назначение реверсивной или реверсивно-селективной рукояти
Что касается наиболее важной рукояти — реверсивно-селективной, то она соединяется с таким же валом. При помощи шариковых подшипников он насаживается сверху на тормозной вал
Особенность конструкции заключается в следующем. Реверсивно-селективный вал, насаженный на тормозной вал, соединен со вторым реверсивно-селективным валом при помощи зубчатой передачи. Второй вал насаживается на главный. Что касается позиций рычага этого типа, то он имеет девять позиций. Одна из них нулевая, и по 4 позиции в каждом направлении.
При переводе «Вперед» против часовой стрелки — 4 позиции, при переводе «Назад» по часовой стрелке — еще 4. При перемещении рычага вперед, в первую позицию, будет включаться положение «М», соответствующее работе в тяговом режиме. Три следующих позиции будут соответствовать разным схемам соединения тяговых двигателей в тормозном режиме работы. Это будет параллельное соединение «П», последовательно-параллельное «СП» и последовательное «С». Что касается положений при перемещении рукоятки назад, то все они будут аналогичным этим.
Принцип действия ПЛК
В отличие от микропроцессорной техники принцип действия ПЛК немного другой. Софт делится на две части. Первая часть представляет собой блок системных программ. Если провести аналогию с ПК, то системное ПО контроллера выступает в роли операционной системы, ответственной за работу низкоуровневых процессов. Системная часть ПО устанавливается в постоянной памяти в любой момент вступает в работу.
Когда ПЛК включается, то уже через мгновение запускается операционная система. Выполнение пользовательской программы циклическое. Цикл работы состоит из четырех фаз:
- Опрос входов;
- Выполнение команд;
- Установка значений для входов;
- Вспомогательные операции.
Первая фаза цикла полностью обеспечивается системным ПО управления ПЛК. Затем управление берет на себя прикладное ПО – созданный оператором алгоритм. По данной программе контроллер будет выполнять то, что от него хотят. По завершению выполнения этих команд работа опять передается системному ПО. Процесс составления управляющей прикладной программы ПЛК максимально упрощен – программист не должен задумываться, как управлять аппаратными возможностями. Оператор лишь должен указать, какой сигнал будет на входе и как нужно на него реагировать на выходе.
Установка драйвера на сетевую карту в Windows 10, 8, 7
Если на ноутбуке, компьютере установлена система Windows 7, 8, 10, первым делом стоит найти драйвер в сети. Когда ПК известно его местоположение, устройство способно обновить данные в автоматическом режиме. В операционных системах Windows 7, 8 необходимо просмотреть информацию через диспетчер устройств.
Важно! Windows 10 дает возможность сразу перейти в центр обновления оборудования и выбрать нужный пункт
Обновляем драйвер вручную (если нет файла setup.exe)
В ноутбуке, компьютере есть инструменты для ручной установки драйвера. В свойствах сетевой карты отображены сведения о последних обновлениях План действий:
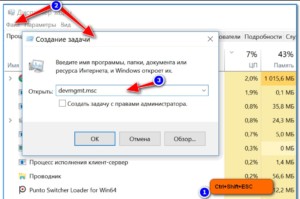
- Комбинация Win+R.
- Выбор devmgmt.msc.
- Кнопка Enter.
- Поиск адаптера.
- Переход в ИД оборудования.
- Просмотр сведений.
- Выбор значения.
- Кнопка «Обновить».
Советы начинающим программистам микроконтроллеров
Чтобы первый опыт в программировании МК не закончился неудачей и навсегда не отбил охоту заниматься этим делом, нужно следовать некоторым советам:
- Начинать с изучения периферии и ее особенностей.
- Каждую большую задачу надо разделять на максимально количество мелких.
- В начале пути не стоит упрощать себе жизнь и пользоваться кодогенераторами, нестандартными фичами и т. п. вещами.
- Обязательно нужно изучать языки программирования (Си и Ассемблера).
- Читайте Даташит.
- Соберите необходимый набор инструментов. Это стоит определенных денег, но окупит себя экономией времени и качеством работы.
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:
Сколько бывает портов UART на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7+ UART |
Инвентированный сигнал и UART
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет. Также стоит отметить, что такой порт будет работать значительно медленнее, чем физический и он не подойдет для подключения приемника, например, так как такое замедление критично. Процессор тоже будет работать с повышенной нагрузкой.
История создания
В 60 годах 20 века для управления телефонными станциями, промышленным оборудованием использовались сложные схемы с реле. Они не отличались повышенной надежностью или ремонтопригодностью. Инженерам одной из компаний, американской General Motors, была поставлена цель по созданию нового оборудования. Задачи, на которые оно было рассчитано, выглядели так:
- Упрощение отладки, замены.
- Относительная дешевизна.
- Гибкость, удобство модернизации.
- Снижение риска отказов.
Терминология, объясняющая, что такое ПЛК (PLC), внесена в международные и европейские стандарты качества МЭК, EN.
Структура и устройство ПЛК
Контроллер можно образно предоставить в формате мини-компьютера, но очень компактного и с особенностями. ПЛК, как и ПК, состоят из оперативной памяти, процессора, вспомогательного периферийного оборудования. Однако, дело еще и в том, что промышленные контроллеры должны выполнять не только расчетные задачи, как ПК, но и заниматься сбором информации от массы устройств – это датчики, сенсоры. Также контроллер и выдают сигналы в цепи.
Сейчас выпускаются контроллеры в различных форм-факторах. Это:
- Устройство типа «всё в одном». В одном корпусе объединен процессор, память, выходы/входы;
- Распределенные решения – процессорный модуль с обвязкой сделан в виде отдельного блока, а по шине или через интерфейсы подключатся модули для вывода и ввода.
Первые модели встречаются очень часто, однако, они рассчитаны на эксплуатацию в малых объектах и системах, где нужно обрабатывать малое количество сигналов.
Второй вид контроллеров используют в промышленности гораздо шире – производства с полнофункциональными АСУ требуют значительно большего числа сигналов, которые требуется обрабатывать. Если производство масштабное, то удобнее разнести модули вводы вывода по территории с объединением в единую сеть, которая подчиняется отдельному логическому контроллеру. Такие сети называют полевыми сетями или fieldbus. К этой седи подключаются датчики, исполнительные системы, которые являются интеллектуальными, так как имеют эту возможность.
Существует масса видов полевых сетей. Стандарт IEC61158 (МЭК61158) включает в себя 8 видов сетей. А до введения этого стандарта каждый производитель придумывал и использовал свою полевую сеть.
В структуре ПЛК имеется базовые компоненты:
- Модуль процессора;
- Блок питания;
- Модули для ввода/вывода.
Процессорный модуль оснащен встроенной памятью. Имеются разъемы для программатора, удаленных устройств, для подключения к сетям. Питание реализовано в виде отдельного блока. Модули могут быть дискретными либо аналоговыми.
В зависимости от того, сколько каналов для ввода и вывода и какой тип процессора, модули ввод/вывод могут быть установлены на одном шасси с ЦП или на нескольких. До конца 80-х годов модули для ввода и вывода данных располагались отдельно от процессора. В стандартном контроллере современного типа модуль входов и выходов находится на одном шасси с микропроцессором. Некоторые ПЛК позволяют устанавливать более одного микропроцессора.
Модели меньших размеров очень часто предназначены под DIN-рейку. Самые компактные микро или даже нано устройства имеют всю систему, включая адаптер питания и систему ввода/вывода в одном корпусе. Микро-контроллеры иногда оборудуются встроенными панелями для настройки и мониторинга. Большинство микро-решений имеют определенное количество каналов входов/выходов и увеличить их не возможно. Как пример — плата ардуино
Что нужно для программирования микроконтроллера
Путь программирования проходит несколько этапов:
- Перед тем как приступить к написанию кода программы, надо определиться с конечной целью.
- Составляется алгоритм работы программы.
- Непосредственное написание кода программы. Коды пишутся на языке Си или Ассемблере.
- Компиляция программы, т. е. перевод ее в двоичную или шестнадцатеричную систему 1 и 0. Только так ее сможет понять МК.
- Откомпилированный код записывают в память контроллера.
- Прошивают МК с помощью программатора. Они бывают двух типов подключения: через COM или USB порт. Самый простой и дешевый программатор USBASP.
- Тестирование и отладка МК на реальном устройстве.
Радиолюбители иногда обходятся без прописывания алгоритма работы программы на бумаги. Они держат его в голове.
Виды и порядок настройки
Сетевые платы выпускаются таких типов:
- встроенные;
- отдельные;
- сетевой контроллер на материнской плате.
Есть различия по типу подключения:
- витая пара;
- коннектор;
- трансивер;
- оптический порт.
Если детальнее рассматривать, витая плата является внутренним элементом, устанавливается в корпусе компьютера. Внешние устройства могут подсоединиться через USB или PCMCIA. Модели на материнской плате фиксируются через порт LPT. Витая пара обеспечивает высокую проводимость.
Важно! Изолированные проводники скручены между собой, имеют оболочку
Коннектор является отличным соединителем и востребован в сетевом оборудовании. Подключение происходит через коаксиальный кабель. Трансиверы выпускаются с физическим разъёмом AUI. По свойствам есть схожесть с коаксиальным кабелем. Оптический порт является наиболее распространённым в сети Ethernet, обеспечивает скоростную передачу данных.
Интересным является вопрос про сетевой контроллер, за что отвечает, и как собственно производить настройку. Согласно определению, плата выступает связующим узлом между сетью и компьютером. Предоставляется доступ к вводу МАС адресу. Во время переключения возможен прием и передача сигнала. Настройка, на примере «Виндовс 10», происходит по инструкции:
- Переход в «Пуск».
- Выбор параметров.
- Вкладка «Сеть».
- «Настройка параметров».
- Подключение локальной сети.
- «Свойства адаптера».
- «Протокол 4».
- «Автоматическое получение IP».
Как работает котроллер
В основном это устройство предназначено для подачи на мотор-колесо поступающей от батареи аккумуляторной энергии. Магнитное поле, создаваемое током, протекающим по обмоткам, отталкивает и притягивает магниты ротора, что приводит колесо в движение. Основная задача контроллера — управление частотой вращения двигателя велосипеда. Но у него есть другие дополнительные функции, которые можно разделить на:
- Регулирование скорости вращения двигателя.
- Управление крутящим моментом.
- Защита двигателя.
Контроллером принимается сигнал от ручки акселератора. На основе принятой информации, осуществляет регулирование скорости вращения двигателя
Быстро раскручивая двигатель, очень важно, чтобы также быстро его можно было, при необходимости, остановить. Чтобы двигатель служил дольше, требуется плавное и мягкое торможение, методом изменения длительности импульсов, что входит также в функции этого прибора
Очень полезно иметь возможность реверса, т.е. обратного хода. Более совершенные модели этих приборов имеют возможность подачи на мотор напряжения противоположной основной полярности, обеспечивая тем самым оптимальный режим изменения вращения двигателя. Регулирование заднего хода, для обеспечения безопасности, происходит на низких оборотах.
Следить за температурой контроллер может благодаря установленному в нем термодатчику, чем предотвращает в электросистеме велосипеда токовую перегрузку.
Помимо мотор-колеса к нему подсоединены и все другие комплектующие велосипеда, для подключения которых предназначены высококачественные многожильные соединительные провода, защищенные силиконовой термостойкой изоляцией.
Ряд важных параметров, таких как, например, напряжение батарей, максимальный рабочий ток и пр., определяют с какими аккумуляторами и электрическими моторами могут работать контроллеры.
Ограничения ПЛК
ПЛК имеет ограниченную память, программное обеспечение и периферийные возможности, по сравнению с персональным компьютером ПК. Управление движением (например, робототехника или сложная автоматизированная система) требует огромного количества входов/выходов, требующих дополнительных модулей управление ПЛК или внешней электроники. Тем не менее, стоит отметить, что компьютер способен обрабатывать гораздо большее количество информации, причем быстрее, что может значительно уменьшить физический размер и обеспечить необходимую вычислительную мощность для внедрения систем машинного зрения, управления движением и обеспечить быструю обработку больших потоков данных. Постоянный рост обрабатываемой информации связан с постепенным внедрением некоторыми компаниями промышленных интернет вещей IIoT в производственные линии и промышленные объекты, которые требуют больших вычислительных мощностей.
Оригинальные производители оборудования (англ. original equipment manufacturer OEM) способны увеличить производительность оборудования, позволяя машинам одновременно выполнять несколько операций. Максимально интенсивные И/ИЛИ вычисления критически важных процессов, запущенных одновременно, может привести к перегрузке программируемого логического контроллера. Для уменьшения времени обработки критически важных процессов машины могут использовать несколько вычислительных платформ. Как правило, они включают в себя один или несколько контроллеров движения и один или более наблюдающий процессор, который поддерживает интерфейс оператора для программирования, информации работы машины, сбора данных, функции техподдержки. Однако, использование нескольких процессоров является более дорогим. Новое программное обеспечение, ориентированное на платформы ПК, может помочь решить данную проблему, хотя…
ПК не так надежен и ему трудно «выживать» в промышленных условиях, таких как повышенная запыленность и влажность. Использования ПК с боле сложным программным обеспечением или большим количеством программных опций, занимает гораздо больше времени для обучения обслуживающего персонала. Усовершенствованное программное обеспечение может потребовать наличие программиста для проведения технического обслуживания, а также выполнение ремонтных работ и установки обновлений. Программное обеспечение ПЛК может быть базовым, но имеющие свои проверенные временем стандартные языки, которые могут обеспечить долговечность устройства, несмотря на его скорость и линейный характер.
ПЛК обычно используют в отрасли стандартный набор языков программирования (МЭК 61131-3), в том числе LAD диаграммы. LAD диаграммы строятся по аналогии с электрическими схемами, что позволяет значительно упростить обучение персонала, проведения технического обслуживания и ремонта. В большинстве случаев вполне возможно обойтись без программиста. Другой язык из стандарта МЭК 61131-3 — структурированный текст, который похож на язык «высокого уровня». Тем не менее, использование других нестандартных языков высокого уровня, таких как C ++ или Visual Basic, может быть трудно с ПЛК. Только в последнее время новые программные инструменты позволяли пользователям общаться с ПЛК так, как если бы это был обычный ПК.
Последовательная программа ПЛК сканирует все инструкции в каждом цикле. Цикл сканирования занимает примерно 10 мс или чуть больше. После завершения выполнения всех инструкций программа переходит к следующему сканированию. Если инструкция не выполняется в установленное время, то это вызывает сообщение об ошибке и выполнение программы прекращается. Это программное обеспечение жесткого времени может ограничивать продолжительность программы и любые входные сигналы с частотой менее 100 Гц.
Например, если необходимо обрабатывать сигнал от датчика скорости с номинальными оборотами 1200 об/мин (частота сигнала 1200/60 = 200 Гц), микроконтроллер на базе ПЛК не может корректно измерять скорость используя такой вход. Необходима интеграция специального модуля с декодером или счетчиком на интегральных микросхемах, который преобразует сигнал от датчика в нормально-обрабатываемый микроконтроллером. Такие преобразовательные модули часто используются во многих системах. Также стоит отметить и необходимость модулей вывода на примере управление соленоидом с частотой работы ШИМ в 10 кГц. Для управления таким устройством с помощью ПЛК необходим модуль вывода с ШИМ генератором. Добавление таких модулей увеличивает стоимость системы в 2-3 раза.
Типы ПЛК
Все ПЛК, выпускаемые Schneider Electric, Mitsubishi, Beckhoff, Omron, Segnetics или Unitronics, четко разделяются по типам. Это же относится к классификации российской продукции, представленной компаниями «Овен», «Контар», «Текон» и другими. Конструктивно устройства принято обозначать как моноблочные и модульные.
В первом типе содержится полный набор входных, выходных цепей, процессор, источник энергии. Во втором предусмотрена сборка готового ПЛК из отдельных частей. Согласно МЭК 61131, количество и состав модулей варьируются в соответствии с назначением, характеристиками поставляемого заказчику устройства.
Модульный микроконтроллер может управлять посредством Ethernet соединения малопроизводительным собратом, выполняющим специфично назначенные функции (диагностика состояния периметра, безопасность охраняемой зоны). Маломощный адаптер питания в этом случае является отдельным модулем. Обобщенно функциональные возможности второго вида превосходят первый. Но в отдельных ситуациях (микроконтроллер управления чайником Berghof) достаточно моноблочного ПЛК.
Главное достоинство такой конструкции — компактность. При этом полностью завершенная конструкция платы, блока контроллера оборудуется дисплеем и устройством ввода-вывода, кнопочной панелью. Типичный пример — «умный» автоматный моноблок, отвечающий за стабилизацию напряжения.
Из нескольких ПЛК, смонтированных на стандартную рейку, набирается укрупненный узел управления. Первоначально конфигурация микроконтроллеров подразумевала замену существовавших релейных, полупроводниковых схем. Со временем задачи усложнились, но и сохранившиеся ограниченно производительные 8 и 16 разрядные процессоры по-прежнему востребованы в промышленности.
На что обращать внимание при покупке
Несмотря на то, что лишь 53 % опрошенных полагают, что объем приобретаемых ПЛК в следующем году будет тем же, рынок остается достаточно здоровым. ПЛК для производств будут приобретаться в таком же объеме и 38 % полагают, что объем закупок в ближайшее время вырастет. Какие же функции должно реализовывать приобретаемое оборудование? Важнейшие указаны ниже (в порядке убывания значимости):
- Универсальная среда программирования для различных аппаратных платформ
- ПЛК с системами распределенного ввода/вывода
- ПЛК со встроенными модулями ввода /вывода
- Связь ПЛК с ПК
- Дублирование процессора и модулей ввода/вывода
- Микро ПЛК
- ПЛК с поддержкой web-технологий, включая оповещение по телефону/электронной почте
- ПЛК со встроенными микропроцессорами PC
- нано ПЛК
- высоконадежные PC-контроллеры с открытой архитектурой
- Переносные устройства программирования
Доступность и важность самой главной характеристики в этом списке неоднократно проявлялась в ответе на вопрос, как выбрать ПЛК: «Не пытайтесь найти самое дешевое оборудование; переподготовка специалистов для работы с новым программным обеспечением сведет всю экономию к нулю. Выберите одного-двух производителей и работайте только с ними», + вот типичный ответ
Другой инженер управления утверждает: «Самое главное – программное обеспечение для программирования контроллеров. Различий в удобстве использования программного обеспечения гораздо больше, чем в железе». Наконец, некоторые респонденты резюмируют: «стандартизированный язык программирования крайне необходим». В любом случае, такой список пожеланий позволяет производителям ПЛК/PAC сконцентрироваться на действительно необходимых функциях.
Среда разработки
На сегодня нельзя найти универсальной среды для программирования МК. Это связано с его внутренней структурой и наличием технического обеспечения записи кода в память контроллера.
Вот несколько сред программирования:
- FlowCode – универсальная графическая среда. Программируется с помощью построения логических структур блок-схем.
- Algorithm Builder. Тоже графическая среда. Но написание кода проходит в 3–5 раз быстрее, чем в FlowCode. В ней совмещены графический редактор, компилятор, симулятор МК, внутрисхемный программатор.
- В ней объединены Ассемблер и С/С++. Функционал среды позволяет самостоятельно прошивать МК.
- Image Craft. Как и предыдущая поддерживает Ассемблер и С/С++ языки. В ее составе есть библиотека, позволяющая работать с отдельными устройствами МК.
- Популярная среда для любителей. Имеет Си-подобный язык, но отличающийся от других. Он более понятен человеку. Поддерживает библиотеки, в составе которых есть драйвера для подключения некоторых платформ.
Среды бывают платные и бесплатные. Выбирая конкретную среду, нужно исходить из ее функционала, языка программирования, поддерживаемых интерфейсов и портов.
Зачем нужен контроллер
Одноцветной светодиодной ленте контроллер не требуется, она просто подключается к блоку питания, который обычно имеет маркировку DC12V для 12-ти вольтных моделей, если лента отличается по напряжению, нужно подобрать соответствующий БП. В принципе, наиболее распространенными являются модели на 12 – 24 В, причем экземпляры с большим напряжением достаточно экзотичны. Встречаются и виды светодиодных лент для подключения к сети 220 В напрямую, но их не бывает в RGB исполнении.
Контроллер играет роль переключателя цепей от источника питания к потребителю. На ленте расположено три ряда светодиодов, различающихся по цвету, либо все три цвета выполнены в виде отдельного кристалла в одном корпусе светодиода, например, типа 5050:
- Зеленый.
- Синий.
- Красный.
Контроллеры бывают различного исполнения, в том числе герметичного, на них указана степень защиты от воды и пыли в виде IPхх, причем IP20 – самый нежный, его нельзя использовать на улице или во влажных помещениях, а IP68 – защищен хорошо. Ленты тоже бывают разными по степени защиты, маркируются таким же образом. Иногда производители используют более понятную пометку, надпись «Waterproof» гласит о водонепроницаемости прибора.
https://youtube.com/watch?v=f0sqzZctlEA